【论文原文】RCNN
Rich Feature Hierarchies For Accurate Object Detection And Semantic Segmentation
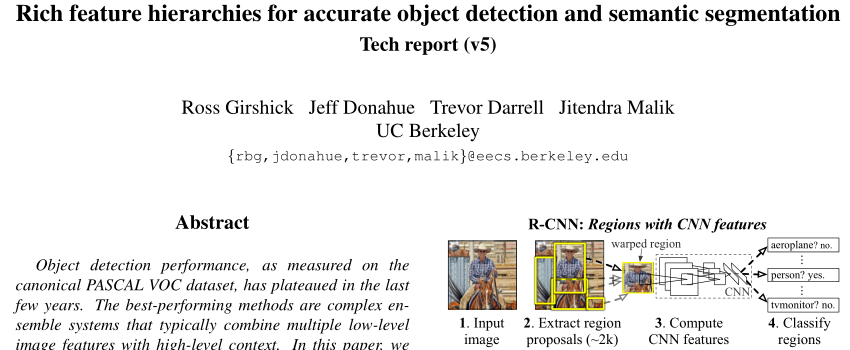
In this paper, we propose a simple and scalable detection algorithm that im- proves mean average precision (mAP) by more than 30% relative to the previous best result on VOC 2012—achieving a mAP of 53.3%. Our approach combines two key insights: (1) one can apply high-capacity convolutional neural net- works (CNNs) to bottom-up region proposals in order to localize and segment objects and (2) when labeled training data is scarce, supervised pre-training for an auxiliary task, followed by domain-specific fine-tuning, yields a significant performance boost.
More【论文原文】Fast-RCNN
Fast R-CNN
This paper proposes a Fast Region-based Convolutional Network method (Fast R-CNN) for object detection. Fast R-CNN builds on previous work to efficiently classify ob- ject proposals using deep convolutional networks. Com- pared to previous work, Fast R-CNN employs several in- novations to improve training and testing speed while also increasing detection accuracy.
More【论文原文】Faster-RCNN

Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
State-of-the-art object detection networks depend on region proposal algorithms to hypothesize object locations. Advances like SPPnet [1] and Fast R-CNN [2] have reduced the running time of these detection networks, exposing region proposal computation as a bottleneck. In this work, we introduce a Region Proposal Network (RPN) that shares full-image convolutional features with the detection network, thus enabling nearly cost-free region proposals. An RPN is a fully convolutional network that simultaneously predicts object bounds and objectness scores at each position. The RPN is trained end-to-end to generate high-quality region proposals, which are used by Fast R-CNN for detection. We further merge RPN and Fast R-CNN into a single network by sharing their convolutional features—using the recently popular terminology of neural networks with “attention” mechanisms, the RPN component tells the unified network where to look.
More【论文原文】YOLO
You Only Look Once: Unified, Real-Time Object Detection
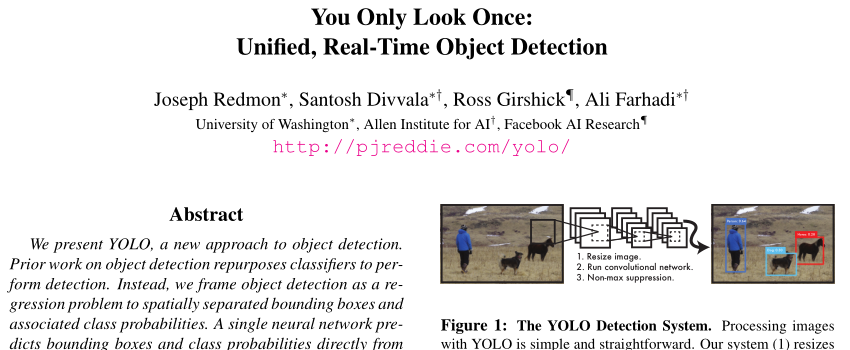
We present YOLO, a new approach to object detection. Prior work on object detection repurposes classifiers to perform detection. Instead, we frame object detection as a regression problem to spatially separated bounding boxes and associated class probabilities. A single neural network predicts bounding boxes and class probabilities directly from full images in one evaluation. Since the whole detection pipeline is a single network, it can be optimized end-to-end directly on detection performance.
More【论文原文】YOLO v2

YOLO9000: Better, Faster, Stronger
We introduce YOLO9000, a state-of-the-art, real-time object detection system that can detect over 9000 object categories. First we propose various improvements to the YOLO detection method, both novel and drawn from prior work. The improved model, YOLOv2, is state-of-the-art on standard detection tasks like P ASCAL VOC and COCO. Using a novel, multi-scale training method the same YOLOv2 model can run at varying sizes, offering an easy tradeoff between speed and accuracy.
More【论文原文】YOLO v3
YOLOv3: An Incremental Improvement
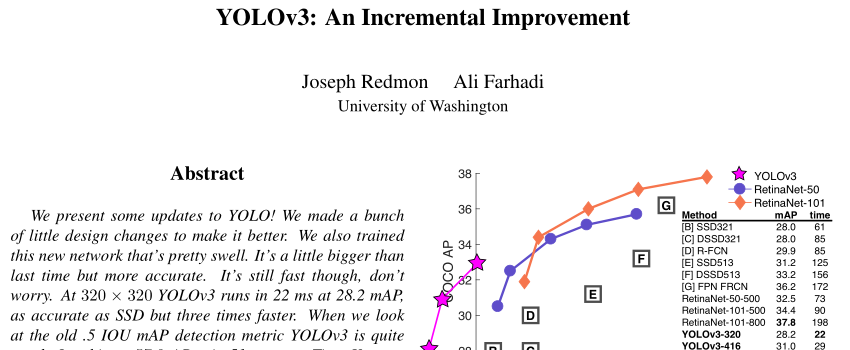
We present some updates to YOLO! We made a bunch of little design changes to make it better. We also trained this new network that’s pretty swell. It’s a little bigger than last time but more accurate. It’s still fast though, don’t worry. At 320 × 320 YOLOv3 runs in 22 ms at 28.2 mAP, as accurate as SSD but three times faster. When we look at the old .5 IOU mAP detection metric YOLOv3 is quite good. It achieves 57.9 AP 50 in 51 ms on a Titan X, compared to 57.5 AP 50 in 198 ms by RetinaNet, similar performance but 3.8× faster.
More